The main aim of the project at the moment is to make Bender independent.
This is important for obvious reasons - if he can figure out for himself how to go from A to B then nobody has to tell him. If he can tell he's running low on battery and go plug himself in, great, effectively he will run forever, but theres a long way to go before that!
Sonar has been on the TODO list for a while with Bender with the idea of allowing a map be created. A recent assignment at work involved some 3D rendering, and I like the idea of taking ultrasonic data, combining with image data and creating a "GoogleEarthBot"; but thats an aside. With independence, and hence mapping a main objective at the moment a few purchases have been made, see this blog post here, rather than sit on my arse, I've buckled down and started implementing a mapping app.
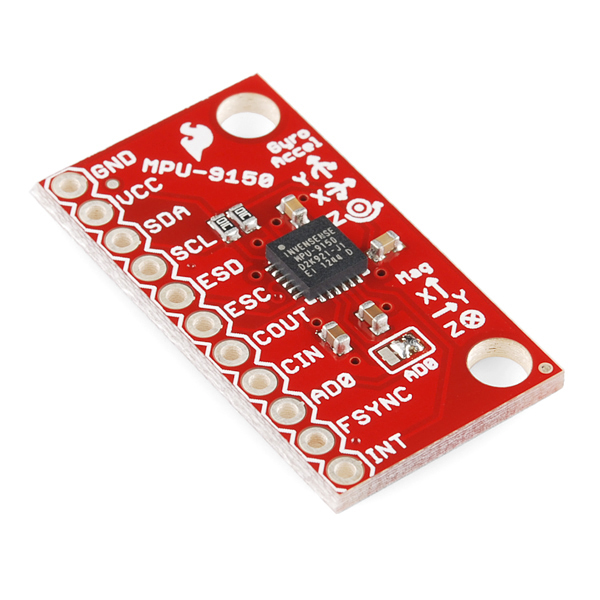
Four of these Ultrasonic detectors

were hooked up to a Raspberry Pi and a test Android app was written to see if a map could be produced.
Unfortunately for some reason the RPi malfunctioned, probably due to the ultrasonic detectors sending an input voltage of 5V when the RPi can only deal with 3.3V at most, so will have to look into getting a small board with some resistors attached such that these detectors can be safely used alongside the RPi.
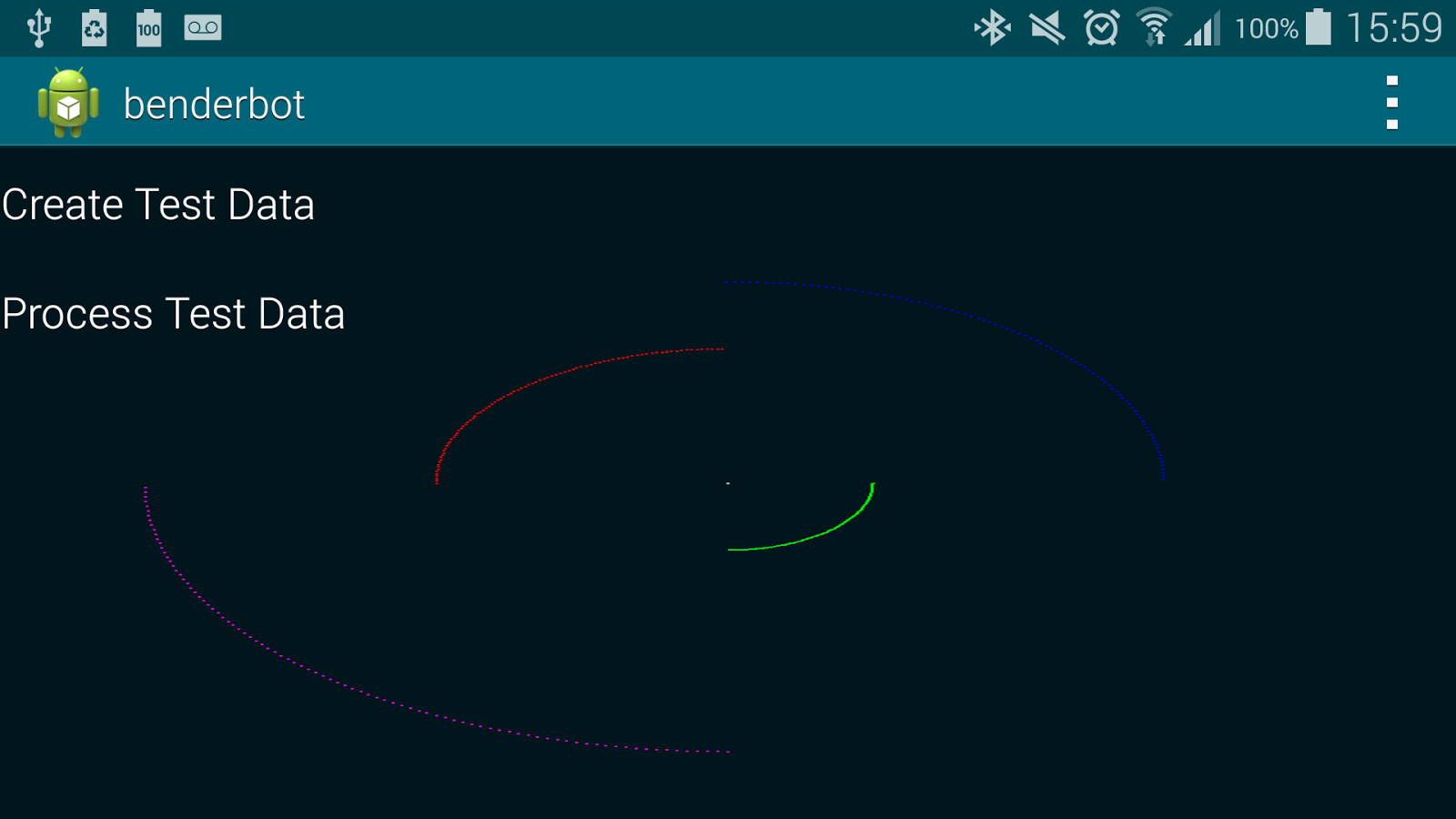
Until this can be achieved tho, the Android app was tested to ensure the sensible data was being output, code will follow soon, but in the meantime, heres some nice screenshots: